
目标检测常用网络笔记
Wain ... 2021-2-17 About 9 min
# 目标检测常用网络笔记
下面根据d2l一书中的介绍简单记录一下各个网络模型的特点,由于书中详细介绍了一个简易的SSD,因此这篇笔记主要以SSD为主,R-CNN系列概括其思想,YOLO系列书中未提及,内容主要源于网上的分享。
# SSD
单发多框检测(single shot multibox detection,SSD)简单、快速,并得到了广泛应用。该模型的一些设计思想和实现细节常适用于其他目标检测模型。
# 网络结构
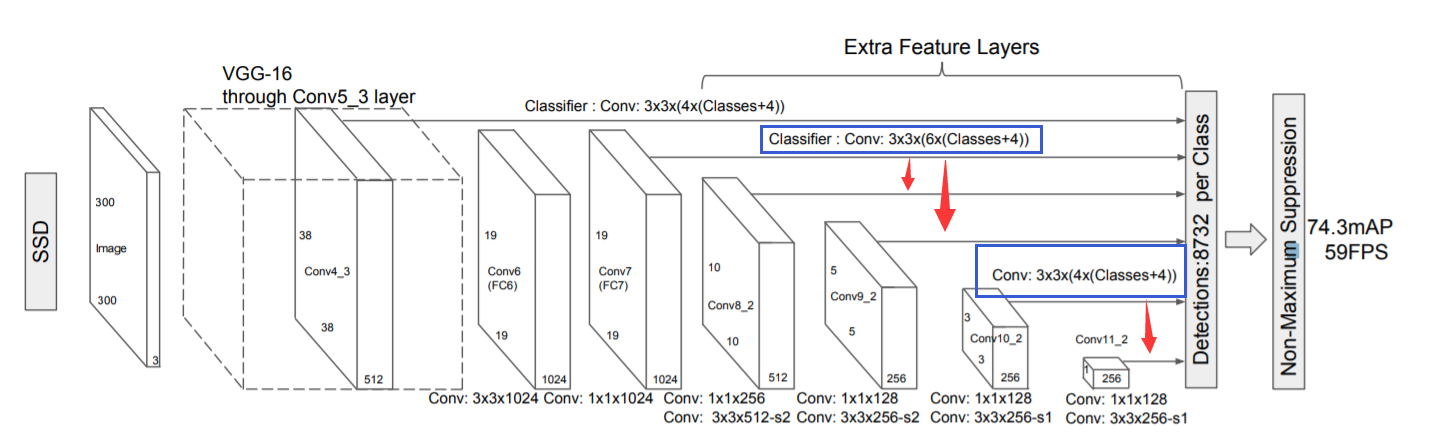
首先特征提取网络选用了VGG-16,后面继续使用卷积来缩小特征图以获得多尺度,此外还设计了6个多尺度检测模块来生成锚框。Conv:3x3x(4x(Classes+4))中,3x3是卷积核大小(d2l中padding为1),4为锚框数量,Classes+4中的4为offsets。由此可以看出,SSD在每个类别的探测锚框数为:
# 锚框的参数
锚框主要有两个参数——scale与ratio。在论文中,作者提到,scale由以下公式计算:
其中m为用于探测的fmap个数,SSD300(上图)中为6,k为当前的fmap索引。不难发现,一开始scale比较小,fmap也比较大,可以用于探测小物体,后面锚框逐渐变大,用于探测大物体。
由于每个fmap的scale是固定的,因此锚框的个数主要由ratio个数决定。作者选取了5个ratio(1,2,3,1/2,1/3),其中在某些fmap丢弃3与1/3的ratio,对于ratio为1的情况,还增加了一个的锚框,总共形成6个锚框(部分4个)。为了使锚框中心位于像素中心,计算坐标时还加了0.5的偏置,公式为:
其中是第k个fmap的大小,i,j为像素索引,
# 锚框的标注
锚框的标注仍使用IoU最大的先匹配,优先匹配完所有的gt bbox。随后,对于剩余的锚框,若最大IoU大于0.5,也进行相应匹配。匹配的同时标注类别,计算offset。
# 模型预测
在模型预测方面,使用特定fmap33same卷积后的结果,设置一定的通道数。设目标的类别个数为。每个锚框的类别个数将是,其中类别0表示锚框只包含背景。在某个尺度下,设特征图的高和宽分别为和,如果以其中每个单元为中心生成个锚框,那么我们需要对个锚框进行分类。如果使用全连接层作为输出,很容易导致模型参数过多。因此可以使用3x3的same卷积,类别输出通道数为,对应每个像素a个锚框在q+1类的score,offset输出通道数为,对应每个像素a个锚框的4个偏置。
d2l中使用cls_predictor来预测类别,bbox_predictor来预测偏置:
def cls_predictor(num_inputs, num_anchors, num_classes):
return nn.Conv2d(num_inputs, num_anchors * (num_classes + 1),
kernel_size=3, padding=1)
def bbox_predictor(num_inputs, num_anchors):
return nn.Conv2d(num_inputs, num_anchors * 4, kernel_size=3, padding=1)
1
2
3
4
5
6
2
3
4
5
6
在编程时,卷积后输出为 (batch size, number of channels, height, width),后三个维度可能不同层输出不一样,无法合并结果。d2l中的策略是,将channels(预测结果)调到最后一个维度,然后将这三个维度合并,只留下两个维度,后期使用结果是只需要reshape成(batch size,-1, num_classes + 1)或者(batch size,-1, 4)。第二个维度自然会变成锚框个数。
# 完整的简易模型
d2l中,作者实现了一个简易版的SSD模型,代码如下:
sizes = [[0.2, 0.272], [0.37, 0.447], [0.54, 0.619], [0.71, 0.79],
[0.88, 0.961]]
ratios = [[1, 2, 0.5]] * 5
num_anchors = len(sizes[0]) + len(ratios[0]) - 1
def base_net():
blk = []
num_filters = [3, 16, 32, 64]
for i in range(len(num_filters) - 1):
blk.append(down_sample_blk(num_filters[i], num_filters[i+1]))
return nn.Sequential(*blk)
def down_sample_blk(in_channels, out_channels):
blk = []
for _ in range(2):
blk.append(nn.Conv2d(in_channels, out_channels,
kernel_size=3, padding=1))
blk.append(nn.BatchNorm2d(out_channels))
blk.append(nn.ReLU())
in_channels = out_channels
blk.append(nn.MaxPool2d(2))
return nn.Sequential(*blk)
def get_blk(i):
if i == 0:
blk = base_net()
elif i == 1:
blk = down_sample_blk(64, 128)
elif i == 4:
blk = nn.AdaptiveMaxPool2d((1,1))
else:
blk = down_sample_blk(128, 128)
return blk
def blk_forward(X, blk, size, ratio, cls_predictor, bbox_predictor):
Y = blk(X)
anchors = d2l.multibox_prior(Y, sizes=size, ratios=ratio)
cls_preds = cls_predictor(Y)
bbox_preds = bbox_predictor(Y)
return (Y, anchors, cls_preds, bbox_preds)
class TinySSD(nn.Module):
def __init__(self, num_classes, **kwargs):
super(TinySSD, self).__init__(**kwargs)
self.num_classes = num_classes
idx_to_in_channels = [64, 128, 128, 128, 128]
for i in range(5):
# The assignment statement is self.blk_i = get_blk(i)
setattr(self, f'blk_{i}', get_blk(i))
setattr(self, f'cls_{i}', cls_predictor(idx_to_in_channels[i], num_anchors, num_classes))
setattr(self, f'bbox_{i}', bbox_predictor(idx_to_in_channels[i], num_anchors))
def forward(self, X):
anchors, cls_preds, bbox_preds = [None] * 5, [None] * 5, [None] * 5
for i in range(5):
# getattr(self, 'blk_%d' % i) accesses self.blk_i
X, anchors[i], cls_preds[i], bbox_preds[i] = blk_forward(
X, getattr(self, f'blk_{i}'), sizes[i], ratios[i],
getattr(self, f'cls_{i}'), getattr(self, f'bbox_{i}'))
# In the reshape function, 0 indicates that the batch size remains
# unchanged
anchors = torch.cat(anchors, dim=1)
cls_preds = concat_preds(cls_preds)
cls_preds = cls_preds.reshape(cls_preds.shape[0], -1, self.num_classes + 1)
bbox_preds = concat_preds(bbox_preds)
return anchors, cls_preds, bbox_preds
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
# 数据增强
论文中作者提到,模型训练时使用了不同策略的数据增强以防止过拟合。策略主要有随机裁剪、水平翻转、形变等。
# 损失函数
模型的损失函数主要有两部分组成,分别为位置损失(localization loss)与类别损失(confidence loss)。
其中,设为1。选用交叉熵损失函数,使用Smooth L1函数:
# Hard negative mining
在进行锚框标注后,可能会出现大量的负样本,造成负样本数量远大于正样本,因此作者使用了Hard negative mining的策略。
对负样本分类时候,loss比较大(label与prediction相差较大)的那些样本,也可以说是容易将负样本看成正样本的那些样本,例如锚框里没有物体,全是背景,这时候分类器很容易正确分类成背景,这个就叫easy negative;如果锚框里有二分之一个物体,标签仍是负样本,这时候分类器就容易把他看成正样本,这时候就是hard negative。
作者把负样本中的进行排序,只保留loss较大的负样本,使正负样本比例最多为1:3。
# 总结
总的来说,SSD具有如下主要特点:
目标检测速度是比较快
从YOLO中继承了将detection转化为regression的思路,一次完成目标定位与分类
基于Faster RCNN中的Anchor,提出了相似的Prior box
运用了多尺度的检测方式
锚框的生成依赖于scale与ratio这两个超参数
# R-CNN系列
下面简要概括d2l中对R-CNN的描述。
# R-CNN
R-CNN主要由以下4步构成:

对输入图像使用选择性搜索(selective search)来选取多个(2k个)高质量的具有不同的形状和大小提议区域(Region Proposal),并进行标注。
选取一个预训练的卷积神经网络,并通过前向计算输出抽取的提议区域特征。
将每个提议区域的特征连同其标注的类别作为一个样本,训练多个支持向量机对目标分类。其中每个支持向量机用来判断样本是否属于某一个类别。
将每个提议区域的特征连同其标注的边界框作为一个样本,训练线性回归模型来预测真实边界框。
R-CNN虽然通过预训练的卷积神经网络有效抽取了图像特征,但它的主要缺点是速度慢,因为每个提议区域都必须经过CNN提取特征。
# Fast R-CNN
Fast R-CNN对R-CNN的一个主要改进在于只对整个图像做卷积神经网络的前向计算。

其中池化层(region of interest pooling)的输出大小是可以指定的,这样可以将不同形状的Region Proposal转化为统一大小,以便于后续的预测。
# Faster R-CNN

Fast R-CNN通常需要在选择性搜索中生成较多的提议区域,以获得较精确的目标检测结果。Faster R-CNN提出将选择性搜索替换成区域提议网络(region proposal network),从而减少提议区域的生成数量,并保证目标检测的精度。
# YOLO系列
YOLO(You Only Look Once)系列与SSD一样采用一步到位的策略(one-stage),没有先产生region proposal再去分类。YOLO系列v1至v3由Joseph Redmon等人提出,后续作者不再更新网络,由Alexey Bochkovskiy提出了v4,另外v5版本存在一定争议,作者没有发表论文,只提供了代码。由于YOLO版本较多,自己了解不深,这里主要收集展示一些自己认为写得比较好的博客。
v1(划分网格,预测坐标类别等):https://blog.csdn.net/lipengfei0427/article/details/103589165
v2(引入anchor box,将最后的全连接层改为全卷积层)、v3(加深网络、多尺度预测、更换logistics loss):https://blog.csdn.net/lipengfei0427/article/details/103726333
v3、v4(总结并提出大量技巧进行实验得出最佳组合):https://blog.csdn.net/nan355655600/article/details/106246625
v5:https://blog.csdn.net/nan355655600/article/details/107852353
v1-v4的发展史:https://zhuanlan.zhihu.com/p/139128562
v3的pytorch实现:https://zhuanlan.zhihu.com/p/137797393
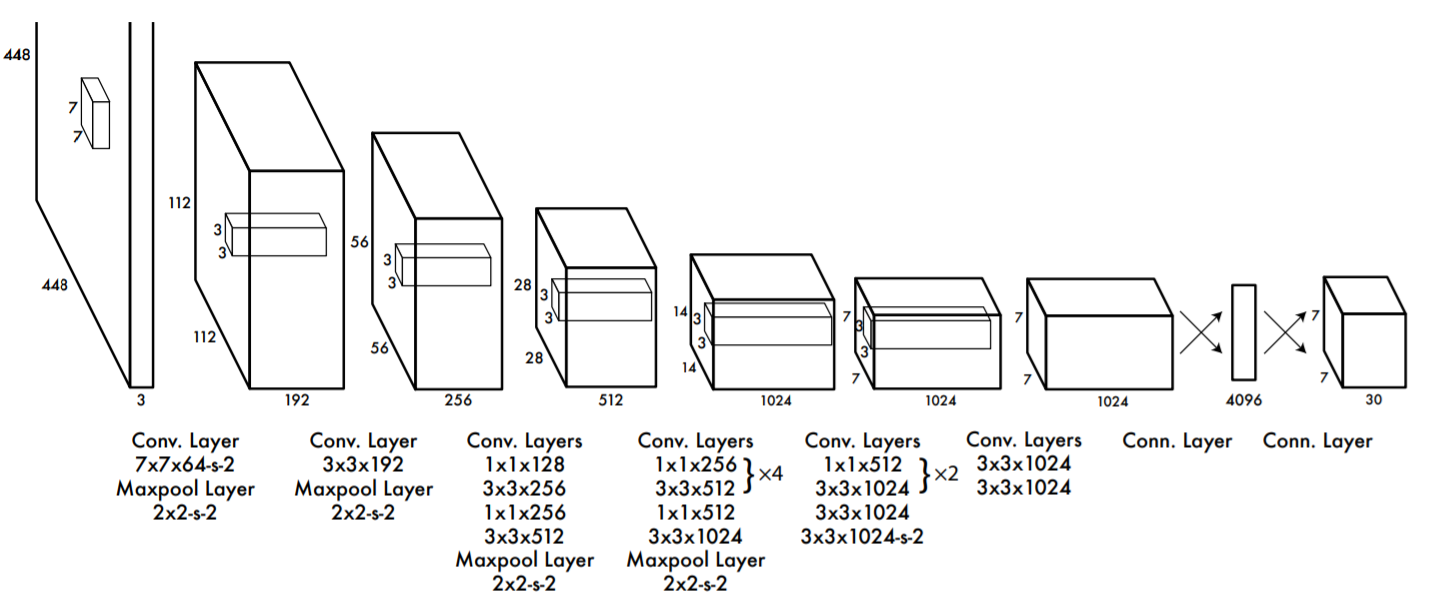
同时附上Redmon论文中V1的网络结构:
# 参考资料
- https://zh.d2l.ai/chapter_computer-vision/ssd.html#单发多框检测(SSD) (opens new window)
- https://d2l.ai/chapter_computer-vision/ssd.html (opens new window)
- https://d2l.ai/chapter_computer-vision/rcnn.html (opens new window)
- https://arxiv.org/pdf/1512.02325.pdf (opens new window) (SSD)
- https://www.zhihu.com/question/46292829/answer/284236956 (opens new window)
- https://blog.csdn.net/weixin_42273095/article/details/81699352 (opens new window)
- https://zhuanlan.zhihu.com/p/31427288 (opens new window)
- https://arxiv.org/pdf/1311.2524.pdf (opens new window) (R-CNN)
- https://arxiv.org/pdf/1504.08083.pdf (opens new window) (Fast R-CNN)
- https://arxiv.org/pdf/1506.01497.pdf (opens new window) (Faster R-CNN)
- https://arxiv.org/pdf/1506.02640.pdf (opens new window) (YOLO)
- https://arxiv.org/pdf/1612.08242.pdf (opens new window) (YOLOv2/9000)
- https://arxiv.org/pdf/1804.02767.pdf (opens new window) (YOLOv3)
- https://arxiv.org/pdf/2004.10934.pdf (opens new window) (YOLOv4)